
Autores: Ing. Ilse Aimee Kardasch Nava, Dr. José Rubén Fuentes Alvarez, M. en C. Alejandro Morfin Santana
Correo electrónico: ilse_kardasch@exatec.tec.mx, joru.fua@tec.mx, alejandro.morfin@tec.mx
Departamento: Ingeniería Mecatrónica
Grupo de enfoque (investigación): Robótica asistencial en ambientes médicos
Escuela: Tecnológico de Monterrey, Escuela de Ingeniería y Ciencias, Ciudad de México, México.
Palabras clave (Hashtags): #RoboticaAsistencial #RobóticaHospitalaria #NavegaciónAutónoma #MedicinaNuclear

Cuando nos encontramos en una calle desconocida y queremos llegar a un lugar, buscamos puntos de referencia para ubicarnos (tales como semáforos, tiendas, el nombre de las calles o avenidas, entre otros); este mismo procedimiento lo necesita hacer un robot. Así, cuando ellos van reconociendo el lugar también van creando un mapa y, posteriormente, con ayuda de un algoritmo de navegación irán de un sitio a otro con el fin de ayudar a realizar tareas repetitivas o inclusive peligrosas [1]. Una definición formal sobre un robot asistencial es la que provee la Organización Internacional de Normalización (ISO), la cual indica que es “un robot que realiza una tarea útil para los humanos o equipos, excluyendo las aplicaciones de la industria de automatización” [2], es decir, que no incluye a los robots usados para ensamblar partes o que comúnmente se encuentran en las líneas de producción.
En el caso de los hospitales, los robots son usados para el transporte o manipulación de materiales (medicamentos, ropa hospitalaria o desperdicios) para que con ello el personal pueda enfocarse en otras actividades [3]. Por ejemplo, el Hospital Universitario de Zealand en Dinamarca emplea robots móviles llamados MiR100 para automatizar el transporte interno de equipo médico estéril y permitir a los operadores ahorrar tiempo en los viajes largos y, a su vez, garantizar el suministro constante de materiales esterilizados a los departamentos que lo necesitan [4]. También en diversos hospitales en Texas, Estados Unidos, se usa el robot Moxi de la compañía Diligent Robotics para tomar objetos con su brazo robótico y llevarlos a las enfermeras [4]. Otro ejemplo es el Hospital Universitario Aalborg en Dinamarca que usa dos robots de la corporación KUKA, uno para abrir cajas y otro para clasificar diariamente hasta 3000 muestras sanguíneas [4].
En México, alumnos y profesores del Tecnológico de Monterrey en colaboración con el Instituto Nacional de Ciencias Médicas y Nutrición Salvador Zubirán (INCMNSZ) realizaron la propuesta de desarrollar un robot de bajo costo que pudiera transportar yodo radiactivo (I-131), un radioisótopo principalmente usado para el tratamiento de afecciones de la glándula tiroidea [5]. El prototipo del robot se muestra en la figura 1 y consta de una base móvil de aluminio con un espacio para colocar un contenedor blindado con plomo. Se planea que el robot navegue por el mapa del departamento de medicina nuclear del INCMNSZ, cuyo diagrama realizado en el programa de diseño SOLIDWORKS se muestra en la figura 2.

(a) Muestra el diseño estructural en un software de diseño asistido por computadora, mientras que en
(b) se observa el pre-prototipo sin la estructura recubierta con plomo.
Los tres componentes más importantes que necesita el robot, para saber dónde se encuentra y a dónde quiere ir, son el sensor óptico LiDAR – cuyo acrónimo en inglés significa Light Detection and Ranging -, una tarjeta Raspberry Pi 4 para procesar la información y los algoritmos de localización, mapeo y navegación. La localización y el mapeo se hacen simultáneamente por medio del algoritmo de SLAM – cuyas siglas en inglés significan Simultaneous Localization and Mapping -, el cual consiste en que, a partir de un punto arbitrario el robot va detectando con los sensores el lugar y qué objetos o puntos de referencia se tienen y, conforme se va desplazando, almacena esa información para construir al mismo tiempo un mapa del lugar [6]. Aunque existen diferentes algoritmos de SLAM, se implementó mediante el software ROS [7], cuyas siglas en inglés significan Robot Operating System, el algoritmo Hector SLAM [8]. Dentro de sus ventajas se destacan su precisión, uso de pocos recursos computacionales, alto procesamiento de información y ser un programa basado en la obtención de datos por medio del sensor LiDAR [8]; sin embargo, la desventaja principal es que puede realizar un escaneo inadecuado si el robot navega a altas velocidades [9]. De acuerdo con [10] que compara a los algoritmos Hector SLAM con Gmapping [11] – el algoritmo de ROS más usado [12] -, Hector SLAM hace la mejor aproximación topológica del mapa pero no logra generar tan buenos resultados al reconstruir las esquinas de un salón de clases (ambiente cerrado). Para uno de los salones evaluados en este artículo, se obtuvo una métrica de diferencia de longitud de los lados del mapa de 40.94 para el Hector SLAM y de 50.053 para el Gmapping [10]. En cuanto a la métrica que evalúa la posición de confrontación de las esquinas del mapa generado por el robot y el mapa real del lugar, se encontró que el valor de Hector SLAM fue de 222.83 mientras que para Gmapping fue de 301.82 [10]. Al tomar en consideración los resultados obtenidos por [10] y las ventajas propuestas por [8] se concluyó usar el algoritmo de Hector SLAM puesto que el robot se moverá a bajas velocidades y navegará en medio del pasillo y no cerca de los bordes del departamento de medicina nuclear.
Por otro lado, para la navegación se usó el algoritmo Adaptive Monte Carlo Localization o AMCL, el cual sirve para la planeación y navegación terrestre [13] y para determinar, mediante probabilidades, si el robot puede pasar por un camino en su ruta, a pesar de que haya objetos, o si debe encontrar otra trayectoria [14]. Regresando a la analogía sobre estar en una calle desconocida, el algoritmo de SLAM sería equivalente a ir caminando por las distintas calles por primera vez para que uno se pueda ubicar y conocer el lugar, y el algoritmo AMLC sería equivalente a ya saber el punto exacto en dónde estamos y a partir de ese punto poder llegar al destino deseado.

Figura 2. Mapa del departamento de medicina nuclear del hospital. a) Vista superior. b) Vista lateral.
La trayectoria que realiza el robot comienza en el cuarto que almacena los materiales radiactivos, entre ellos el I-131, y termina en el mismo lugar. El robot se moverá a lo largo de un pasillo para llegar a la zona donde se prepara al paciente y se le da su tratamiento y posteriormente regresará al almacén. En la figura 2 se muestra cómo el robot empieza a reconocer algunas paredes del hospital y mapea dicho espacio con el algoritmo de Hector SLAM. Por otro lado, la figura 3 es el resultado de todo el mapa del departamento de medicina nuclear por el que se moverá el robot. Finalmente, la figura 4 presenta la ruta que navegará la plataforma móvil, que comienza del punto A para ir al B, después del B al C, del C al D, del D al E y de E a A.
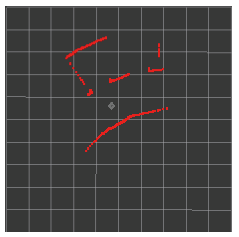
Figura 3. El robot comienza a localizarse dentro del área del Departamento de Medicina Nuclear del INCMNSZ.
El principal beneficio que trae este proyecto, además de la optimización del tiempo para que los trabajadores del hospital puedan hacer otras actividades laborales, es la reducción de la dosis de radiación recibida por el personal ocupacionalmente expuesto (POE) que aunque en la actualidad es mínima, puede ser aún menor al ya no estar en contacto directo con el yodo radiactivo durante el traslado de este radioisótopo.
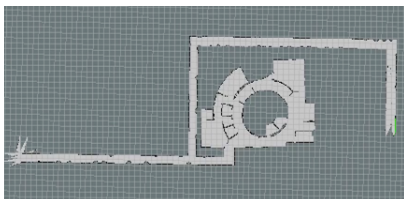
Figura 4. Mapeo del área de interés.
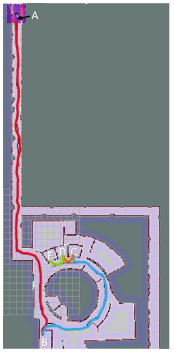
Figura 5. Ruta de navegación hecha por el robot.
Referencias
Referencias
[1] Ñique, V. A. (2011). Análisis sobre la difusión de la Robótica Industrial en Latinoamérica. Revista Iberoamericana de Automática e Informática industrial, 1-4.
[2] Fandiño, F. (2020). Robots móviles en los hospitales: un valioso apoyo para los médicos y profesionales de la salud. mayo 7, 2021, de IM Médico Sitio web: https://www.immedicohospitalario.es/noticia/19113/robots-moviles-en-los-hospitales-un-valioso-apoyo-para-los-medicos.html
[3] International Standardization Organization. (2014). Vocabulary. Recuperado de:https://www.iso.org/obp/ui/#iso:std:iso:8373:ed-2:v1:en:term:2.10
[4] Holland, J., Kingston, L., McCarthy, C., Armstrong, E., O’Dwyer, P., Merz, F., & McConnell, M. (2021). Service robots in the healthcare sector. Robotics, 10(1), 47.
[5] Medina-Ornelas, S., García-Pérez, F., & Granados-García, M. (2018). Impacto de la medicina nuclear en el diagnóstico y tratamiento del cáncer diferenciado de tiroides. Gaceta medica de Mexico, 154(4), 509-519.
[6] Siegwart, R., Nourbakhsh, I. R., & Scaramuzza, D. (2011). Introduction to autonomous mobile robots. MIT press, 348-349.
[7] Open Robotics. (2021). ROS – Robot Operating System. Recuperado de: https://www.ros.org/
[8] Open Robotics. (2021). Hector_mapping. De Open Robotics. Recuperado de: http://wiki.ros.org/hector_mapping
[9] S. Kohlbrecher, O. von Stryk, J. Meyer and U. Klingauf. (2011). A flexible and scalable SLAM system with full 3D motion estimation. 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, pp. 155-160, doi: 10.1109/SSRR.2011.6106777.
[10] Rojas-Fernandez, M., Mújica-Vargas, D., Matuz-Cruz, M., & Lopez-Borreguero, D. (2018). Performance comparison of 2D SLAM techniques available in ROS using a differential drive robot. 2018 International Conference on Electronics, Communications and Computers (CONIELECOMP), 50-58.
[11] Open Robotics. (2019). gmapping. De Open Robotics. Recuperado de: http://wiki.ros.org/gmapping
[12] Sivý, Radovan & Perdukova, Daniela. (2016). Verification of Slam Methods on Ros Platform. Transactions of the VŠB – Technical University of Ostrava, Mechanical Series. 62. 59-66. 10.22223/tr.2016-1/2011.
[13] Open Robotics. (2021). amlc. De Open Robotics. Recuperado de: http://wiki.ros.org/amcl
[14] Fox, D., Burgard, W., Dellaert, F., & Thrun, S. (1999). Monte carlo localization: Efficient position estimation for mobile robots. AAAI/IAAI, 1999(343-349), 2-2.
ANEXO
Resumen: Los robots asistenciales pueden usarse en la clínica para simplificar procesos que realiza el personal. En este trabajo se presenta la propuesta de un algoritmo de navegación autónoma para dotar a un robot con la capacidad de transportar material radiactivo dentro de las instalaciones del Instituto Nacional de Ciencias Médicas y Nutrición Salvador Zubirán (INCMNSZ), con la finalidad de reducir la dosis de radiación recibida por el Personal Ocupacional Expuesto (POE) del área de Medicina Nuclear. La propuesta contempla el uso de un sensor LiDAR, así como algoritmos de SLAM y navegación.





{kind=link}