
Autores:
Andrés Blanco Ortega, Jonathan Villanueva Tavira, Héctor M. Buenabad Arias.
Importancia de la investigación:
La lectura y decodificación del pensamiento a través de las interfaces cerebro-computadora puede ser utilizada en la industria médica e ingenieril para optimizar y simplificar diversas tareas y aplicaciones.
Escuelas: TecNM/Centro Nacional de Investigación y Desarrollo Tecnológico,
Palabras clave (Hashtags): #Sistemas de rehabilitación, #robótica para la rehabilitación, #rehabilitador de tobillo, #fisioterapia.
Disciplina: Ingeniería y Ciencias.
Área: Ingeniería, Medicina, Ciencias, Matemáticas, Computación.
Industria: Médica e Ingeniería de Control.
Los seres humanos estamos sujetos a presentar incidentes traumáticos, los cuales ocasionan lesiones en las extremidades inferiores y/o superiores. Estas lesiones ocasionan que no se puedan realizar actividades de la vida cotidiana. Posteriormente al tratamiento médico, el paciente, generalmente, mantiene en reposo la parte afectada. Cuando un músculo no se utiliza o se debilita, tiende a acortarse, resultando que las articulaciones se vuelvan rígidas y ocasionando deformidades. Esto provoca un deterioro muy notable sobre músculos y articulaciones, que, sin el estímulo del movimiento o una terapia física, pierden parte de sus aptitudes. Por lo que, generalmente, después de un tratamiento médico se requiere de un proceso de rehabilitación.
Otra problemática que se presenta en los seres humanos es el Accidente Cerebrovascular (ACV), también conocido como ictus, el cual es un síndrome clínico que genera discapacidad tanto física como cognitiva severa a largo plazo, perdiendo la capacidad de ser autosuficiente, y es causado por una hemorragia o bloqueo en los vasos sanguíneos del cerebro, que daña las células cerebrales y puede ser fatal, causando la muerte [1]. Un paciente que sufrió un ACV generalmente tiene pérdida de movimiento en la mitad del cuerpo, requiriendo rehabilitación inmediata para recuperar parte de la movilidad en las extremidades. En México se registran 170 mil casos de infarto cerebrovascular, de los cuales el 75 por ciento de las personas tendrá discapacidad total (grave o moderada), y solo el 25 por ciento logrará una recuperación exitosa [2].
La rehabilitación es un proceso de reincorporación física, mental y social de duración limitada que tiene como propósito integrar a una persona a sus actividades diarias. Cualquier persona puede necesitar rehabilitación en algún momento de su vida, como consecuencia de una lesión, intervención quirúrgica, enfermedad, o cuando se presentan ciertas limitaciones funcionales como consecuencia del propio envejecimiento.
La Ingeniería Mecatrónica es una sinergia de varias disciplinas de ingeniería como la mecánica, electrónica, control y sistemas informáticos para el diseño y fabricación de productos electromecánicos inteligentes. En las últimas décadas, se han propuesto diversas máquinas o sistemas mecatrónicos (robots) para rehabilitación de miembros superiores e inferiores, siendo la mayoría de movimiento pasivo continuo (MPC). Las máquinas de MPC son utilizadas en la etapa inicial del proceso de rehabilitación, donde el paciente no aplica fuerza o no realiza esfuerzo para mover la parte afectada, la máquina es quien realiza el movimiento de la parte afectada. Las máquinas de MPC son utilizadas para recuperar la movilidad, evitar la rigidez en las articulaciones y recuperar el rango de movimiento. Estas máquinas son solo una herramienta para la labor física de los fisioterapeutas, de manera que proporcionen movimientos suaves, continuos y personalizados, con base en el estado de la lesión de cada paciente.
Para el diseño de estas máquinas se deben de conocer los movimientos que se tienen en las articulaciones, conocidos como grados de libertad. También, conocer las amplitudes máximas en cada uno de los movimientos, los movimientos que los fisioterapeutas proporcionan a los pacientes en sus sesiones de rehabilitación, que dependen del nivel de afectación.
La rehabilitación de las partes lesionadas del cuerpo requiere de un ejercicio de entrenamiento repetitivo y progresivo, y para mejorar la efectividad de la rehabilitación, el uso de sistemas robóticos es requerido por su capacidad intensiva de movimientos y su tiempo de duración.
En el TecNM/Centro Nacional de Investigación y Desarrollo Tecnológico, se han desarrollado diversos dispositivos robóticos para la rehabilitación, tanto de extremidades superiores como inferiores.
En la Figura 1 se muestra un rehabilitador de extremidades superiores con cable flexible [3, 4], prototipo virtual (diseño en un programa asistido por computadora) y prototipo físico. Este sistema mecatrónico contiene un sistema tipo grúa, en la parte superior se puede mover en los ejes X y Y. Al enrollar el cable, se tiene un movimiento en el eje Z. Con estos movimientos del sistema tipo grúa, se pueden proporcionar movimientos como: flexión, extensión, abducción, aducción, rotación externa y circunducción del brazo; flexión del brazo.
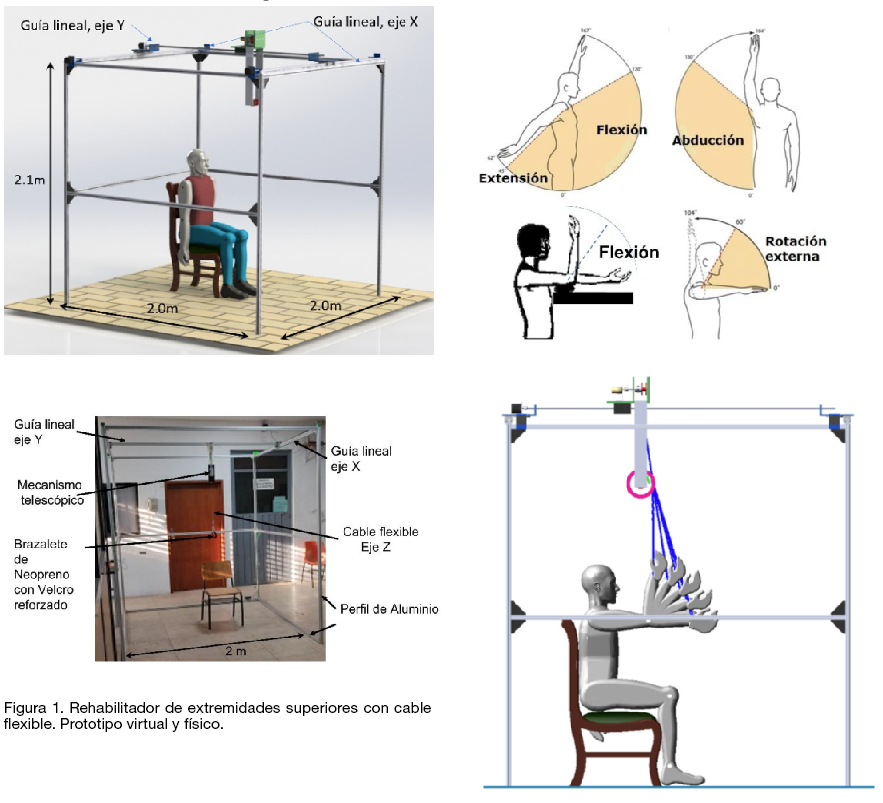
Este tipo de sistema proporciona ventajas como rehabilitar ambas extremidades (derecha o izquierda), mayor amplitud de movimiento y más tipos de movimientos de rehabilitación.
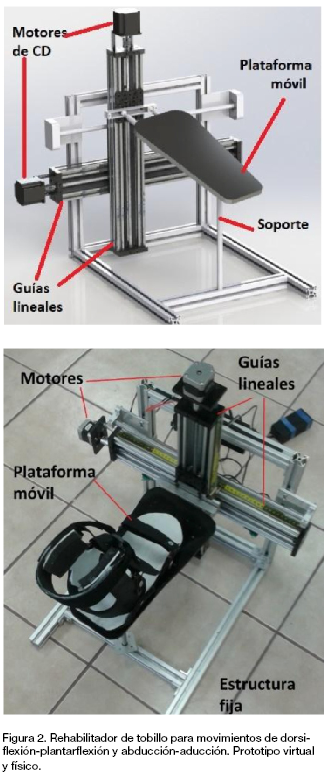
De manera similar, se presenta en la Figura 2 un rehabilitador para lesiones en el tobillo [5, 6]. Se muestra el prototipo virtual, el prototipo físico y los movimientos que se tienen en la articulación del tobillo. Este diseño mecatrónico proporciona movimientos de dorsiflexión-plantarflexión y abducción-aducción del tobillo. También proporciona movimientos combinados y complejos, como el trazar las letras del abecedario en un plano imaginario con el dedo hallux (dedo gordo del pie).
En la Figura 3, se muestran dos prototipos para la rehabilitación de la cadera. Estos son dispositivos que ayudan a disminuir el esfuerzo del fisioterapeuta en un proceso de rehabilitación. Puesto que, en la rehabilitación de la cadera, en movimientos de flexión, extensión y abducción, aducción, el especialista tiene que cargar toda la pierna del paciente para realizar los movimientos. Este sistema robótico proporciona los movimientos de flexión-extensión, abducción-aducción de la cadera, flexión de la rodilla y movimientos combinados.
Con base en el estado de la lesión en la articulación, el especialista deberá proponer una terapia de rehabilitación con el uso de estas máquinas mecatrónicas de rehabilitación. Definiendo el tipo de movimiento (amplitud y velocidad), el número de repeticiones y el número de sesiones. Posteriormente, y con base en otra valoración, se deberá de cambiar la terapia, hasta lograr una recuperación igual o cercana a como estaba la articulación antes de la lesión. Ese es el objetivo de la robótica para la rehabilitación: apoyar y mejorar la efectividad de los fisioterapeutas con el uso de dispositivos robóticos mientras intentan facilitar la recuperación de los pacientes.

Finalmente, se puede concluir que los rehabilitadores mecatrónicos son dispositivos que buscan mejorar la recuperación de un paciente después de haber padecido algún tipo de enfermedad o lesión en alguna parte de su cuerpo. Estos dispositivos empleados en rehabilitación surgen debido al constante incremento del número de pacientes que requieren rehabilitación, la falta de personal profesional, falta de equipo y los insuficientes centros de rehabilitación. Un dispositivo mecatrónico aplicado a la rehabilitación, básicamente, se enfoca en servir como apoyo al fisioterapeuta en el proceso de recuperación del paciente.
Sin embargo, son muy pocas las máquinas mecatrónicas para rehabilitación que están disponibles comercialmente y al alcance de la población que lo requiere, por su alto costo. Por lo que el interés por desarrollar nuevos dispositivos mecatrónicos para mejorar la calidad de vida de las personas sigue vigente en las instituciones de investigación y desarrollo tecnológico.

Conclusiones
Resumen: La inteligencia artificial es el siguiente gran paso para una revolución industrial. Dicha tecnología es actualmente utilizada por muchos dispositivos de la vida cotidiana, desde celulares y automóviles hasta redes sociales. Dentro de esta área, las interfaces cerebro-computadora son consideradas de gran interés debido a que a través de ellas podemos leer y decodificar el pensamiento del ser humano. Esto abre la puerta a diversas aplicaciones, que pueden ir desde la rehabilitación de pacientes y detección de enfermedades hasta el control de dispositivos externos para simplificar y optimizar diversas actividades humanas.
Referencias
[1] Demofonti, A.; Carpino, G.; Zollo, L.; Johnson, M.J. “Affordable Robotics for Upper Limb Stroke Rehabilitation in Developing Countries: A Systematic Review,” IEEE Trans. Med Robot. Bionics, 3, 11–20, 2021.
[2] Secretaría de Salud. Gobierno de México. https://www.gob.mx/salud/prensa/363-organizaciones-academicas-presentan-posicionamiento-contra-infarto-cerebral-en-mexico?idiom=es. Último acceso: 22 de marzo de 2025.
[3] Vargas-Ortiz, M. U., Blanco-Ortega, A., Lara-Barrios, C. M., Magadán-Salazar, A., Palacios-Gallegos, M. de J., Ramos Fon Bon, V. F. “Análisis Cinemático de un Sistema de rehabilitación para miembros superiores con cables flexibles,” Jornada de Ciencia y Tecnología Aplicada. Vol. 4, Núm. 2, Julio – Diciembre 2021.
[4] Vargas-Ortiz, M. U., Blanco-Ortega, A., Colín-Ocampo, J., Alcocer-Rosado, W., Palacios-Gallegos, M. de J., Ramos Fon Bon, V. F. “Sistema de rehabilitación para miembros superiores con cables flexibles,” Jornada de Ciencia y Tecnología Aplicada. Vol. 4, Núm. 1, enero – junio 2021.
[5] Blanco, A., Gómez, F., Olivares, V., Abúndez, A., Colín, J. “Design and development of a parallel robot based on an XY table for ankle rehabilitation,” Int. J. Automation and Control, 9(2), pp.89–106. 2015.
[6] Blanco Ortega, A.; Magadán Salazar, A.; Guzmán Valdivia, C.H.; Gómez Becerra, F.A.; Palacios Gallegos, M.J.; García Velarde, M.A.; Santana Camilo, J.A. “CNC Machines for Rehabilitation: Ankle and Shoulder Machines,” 10, 1055. 2022, https://doi.org/10.3390/machines10111055
[7] F. A. G. Becerra, A. B. Ortega, C. D. G. Beltrán, C. G. Valdivia and R. O. D. Arcega, “Design and control of a new parallel robot for the rehabilitation of the hip-knee,” in IEEE Latin America Transactions, vol. 16, no. 5, pp. 1314-1319, May 2018, doi: 10.1109/TLA.2018.8407102.





{kind=link}